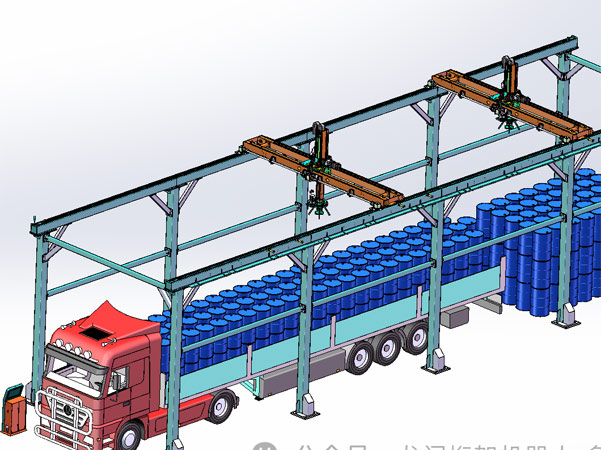
自动卸料系统龙门桁架智慧搬运机械手将“激光扫描云台”与“龙门桁架机械手”相结合,是解决大范围、高精度自动卸料问题的有效技术路径。这一方案的在于:利用云台-激光系统的移动感知能力,为桁架机械手的大行程搬运装上一双“智慧之眼”。
🚀 技术原理:感知与执行的闭环
这一设计的本质是构建一个“感知-决策-执行”的自动化闭环。系统通过以下三个层面的协同工作,实现无人化自动卸料:
· 环境感知层:激光扫描云台。这是系统的“眼睛”。通过将2D激光雷达安装在可旋转的高精度云台上,云台的旋转运动将线扫激光扩展为三维空间扫描。通过融合云台的俯仰/旋转角度与激光测距数据,系统能实时生成作业区域的高精度3D点云,从而识别物料的位置、尺寸、姿态甚至堆放形变 。
· 机械执行层:龙门桁架机械手。这是系统的“手和脚”。采用伺服电机驱动的龙门桁架,负责在X、Y、Z三个大行程方向上实现高精度定位 。末端执行器(如夹爪、吸盘)集成了六维力传感器,提供实时力控反馈,既能确保抓取稳固,又能防止因物料姿态偏差而损坏工件 。
· 控制协同层:大脑。这是系统的“。它将感知与执行连接起来:首先处理点云数据,提取物料的抓取点和避障信息;然后通过路径规划算法,结合桁架的运动学模型,规划出卸料轨迹;后向伺服驱动器发送指令,控制桁架和末端执行器完成抓取和搬运 。
🦾 自动卸料场景下的实现方式
在实际作业中,系统通常通过以下几个阶段协同工作:
1. 扫描建模与粗定位:当载有物料的车辆进入卸料区,桁架带动激光扫描云台移动,对整个车斗或堆场进行全局扫描,快速建立三维模型,确定物料的整体分布和边界 。
2. 定位与抓取规划:系统控制机械手移动到物料上方,通过局部精细扫描识别抓取点。AI算法会考虑物料、堆叠顺序和干涉风险,同时规划无碰撞的卸料轨迹 。
3. 柔顺抓取与搬运:机械手按照规划路径运动。在抓取接触瞬间,依靠力传感器的反馈实现柔顺控制,自动微调姿态以补偿定位误差,确保抓取稳定可靠 。
4. 动态监控与反馈:卸料过程中,云台可实时监控料堆变化,动态调整策略 。同时,系统将完成数据上传给管理软件,实现全流程数字化 。
这种设计方式已在港口实现了不同转运形式的无人化作业,让卸卷钢等复杂流程在正常情况下无需人工介入 。
| 上一条:板材搬运龙门桁架机械手 | 下一条:重型龙门桁架机械手生产厂家 |

 158-5381-9777
158-5381-9777